|
Jpp
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
Jpp
|
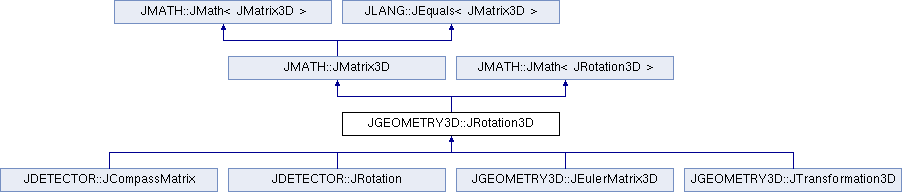
Rotation matrix. More...
#include <JRotation3D.hh>
Public Member Functions | |
| JRotation3D () | |
| Default constructor (= identity matrix). More... | |
| JRotation3D (const JAngle3D &dir) | |
| Constructor. More... | |
| JRotation3D (const JVersor3D &dir) | |
| Constructor. More... | |
| JRotation3D (const JVersor3Z &dir) | |
| Constructor. More... | |
| JRotation3D (const JRotation3X &R) | |
| Constructor. More... | |
| JRotation3D (const JRotation3Y &R) | |
| Constructor. More... | |
| JRotation3D (const JRotation3Z &R) | |
| Constructor. More... | |
| JRotation3D (const JQuaternion3D &Q) | |
| Constructor. More... | |
| const JRotation3D & | getRotation () const |
| Get rotation. More... | |
| operator JQuaternion3D () const | |
| Type conversion operator. More... | |
| JRotation3D & | transpose () |
| Transpose. More... | |
| JRotation3D & | mul (const JRotation3D &A, const JRotation3D &B) |
| Matrix multiplication. More... | |
| void | rotate (double &__x, double &__y, double &__z) const |
| Rotate. More... | |
| void | rotate_back (double &__x, double &__y, double &__z) const |
| Rotate back. More... | |
| JMatrix3D & | setIdentity () |
| Set to identity matrix. More... | |
| void | set (const JMatrix3D &A) |
| Set matrix. More... | |
| JMatrix3D & | reset () |
| Set matrix to the null matrix. More... | |
| JMatrix3D & | negate () |
| Negate matrix. More... | |
| JMatrix3D & | add (const JMatrix3D &A) |
| Matrix addition. More... | |
| JMatrix3D & | sub (const JMatrix3D &A) |
| Matrix subtraction. More... | |
| JMatrix3D & | mul (const double factor) |
| Scale matrix. More... | |
| JMatrix3D & | mul (const JMatrix3D &A, const JMatrix3D &B) |
| Matrix multiplication. More... | |
| JMatrix3D & | mul (const JNullType &object) |
| Multiply with object. More... | |
| JMatrix3D & | div (const double factor) |
| Scale matrix. More... | |
| bool | equals (const JMatrix3D &A, const double eps=std::numeric_limits< double >::min()) const |
| Equality. More... | |
| bool | isIdentity (const double eps=std::numeric_limits< double >::min()) const |
| Test identity. More... | |
| double | getDeterminant () const |
| Get determinant of matrix. More... | |
| void | transform (double &__x, double &__y, double &__z) const |
| Transform. More... | |
| JFirst_t & | mul (const JSecond_t &object) |
| Multiply with object. More... | |
Static Public Member Functions | |
| static const JMatrix3D & | getInstance () |
| Get reference to unique instance of this class object. More... | |
| static const JMatrix3D & | getIdentity () |
| Get reference to unique instance of this class object. More... | |
Public Attributes | |
| double | a00 |
| double | a01 |
| double | a02 |
| double | a10 |
| double | a11 |
| double | a12 |
| double | a20 |
| double | a21 |
| double | a22 |
Rotation matrix.
Definition at line 111 of file JRotation3D.hh.
|
inline |
Default constructor (= identity matrix).
Definition at line 122 of file JRotation3D.hh.
|
inline |
Constructor.
The matrix is defined such that the rotation of a vector in the given direction ends up along the z-axis and the back rotation of a vector parallel to the z-axis ends up in the given direction.
| dir | direction |
Definition at line 137 of file JRotation3D.hh.
|
inline |
Constructor.
The matrix is defined such that the rotation of a vector in the given direction ends up along the z-axis and the back rotation of a vector parallel to the z-axis ends up in the given direction.
| dir | direction |
Definition at line 159 of file JRotation3D.hh.
|
inline |
Constructor.
The matrix is defined such that the rotation of a vector in the given direction ends up along the z-axis and the back rotation of a vector parallel to the z-axis ends up in the given direction.
| dir | direction |
Definition at line 182 of file JRotation3D.hh.
|
inline |
Constructor.
| R | 2D rotation matrix around X-axis |
Definition at line 202 of file JRotation3D.hh.
|
inline |
Constructor.
| R | 2D rotation matrix around Y-axis |
Definition at line 216 of file JRotation3D.hh.
|
inline |
Constructor.
| R | 2D rotation matrix around Z-axis |
Definition at line 230 of file JRotation3D.hh.
|
inline |
|
inline |
|
inline |
Type conversion operator.
Definition at line 283 of file JRotation3D.hh.
|
inline |
|
inline |
Matrix multiplication.
| A | matrix |
| B | matrix |
Definition at line 320 of file JRotation3D.hh.
|
inline |
|
inline |
Rotate back.
| __x | x value |
| __y | y value |
| __z | z value |
Definition at line 355 of file JRotation3D.hh.
|
inlinestaticinherited |
Get reference to unique instance of this class object.
Definition at line 78 of file JMath/JMatrix3D.hh.
|
inlineinherited |
|
inlinestaticinherited |
Get reference to unique instance of this class object.
Definition at line 106 of file JMath/JMatrix3D.hh.
|
inlineinherited |
|
inlineinherited |
Set matrix to the null matrix.
Definition at line 130 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Matrix addition.
| A | matrix |
Definition at line 176 of file JMath/JMatrix3D.hh.
Matrix subtraction.
| A | matrix |
Definition at line 192 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Scale matrix.
| factor | factor |
Definition at line 208 of file JMath/JMatrix3D.hh.
Matrix multiplication.
| A | matrix |
| B | matrix |
Definition at line 241 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Multiply with object.
| object | object |
Definition at line 273 of file JMath.hh.
|
inlineinherited |
Scale matrix.
| factor | factor |
Definition at line 224 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Equality.
| A | matrix |
| eps | numerical precision |
Definition at line 267 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Test identity.
| eps | numerical precision |
Definition at line 288 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Get determinant of matrix.
Definition at line 299 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Transform.
| __x | x value |
| __y | y value |
| __z | z value |
Definition at line 318 of file JMath/JMatrix3D.hh.
|
inlineinherited |
Multiply with object.
| object | object |
Definition at line 273 of file JMath.hh.
|
inherited |
Definition at line 385 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 385 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 385 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 386 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 386 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 386 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 387 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 387 of file JMath/JMatrix3D.hh.
|
inherited |
Definition at line 387 of file JMath/JMatrix3D.hh.
 1.8.5
1.8.5