|
Jpp
19.0.0
the software that should make you happy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
Jpp
19.0.0
the software that should make you happy
|
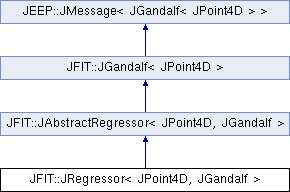
#include <JPoint4DRegressor.hh>
Public Types | |
| typedef JGandalf< JPoint4D > | minimiser_type |
| typedef JRegressor< JPoint4D, JGandalf > | regressor_type |
| typedef minimiser_type::result_type | result_type |
| typedef JFIT_LOCAL::JTypedef_t < JPoint4D >::parameter_type | parameter_type |
| Data type of fit parameter. More... | |
Public Member Functions | |
| JRegressor (double sigma) | |
| Constructor. More... | |
| template<class JHit_t > | |
| result_type | operator() (const JPoint4D &vx, const JHit_t &hit) const |
| result_type | operator() (const JPoint4D &value, T __begin, T __end) |
| Global fit. More... | |
| result_type | operator() (const JFunction_t &fit, T __begin, T __end, Args...args) |
| Multi-dimensional fit of multiple data sets. More... | |
Public Attributes | |
| JLANG::JSharedPointer < JMEstimator > | estimator |
| M-Estimator function. More... | |
| double | sigma |
| Time resolution [ns]. More... | |
| std::vector< parameter_type > | parameters |
| fit parameters More... | |
| int | numberOfIterations |
| number of iterations More... | |
| double | lambda |
| control parameter More... | |
| JPoint4D | value |
| value More... | |
| JPoint4D | error |
| error More... | |
| JMATH::JMatrixNS | V |
| Hesse matrix. More... | |
| result_type | result |
Static Public Attributes | |
| static int | MAXIMUM_ITERATIONS |
| maximal number of iterations More... | |
| static double | EPSILON |
| maximal distance to minimum More... | |
| static double | LAMBDA_MIN |
| minimal value control parameter More... | |
| static double | LAMBDA_MAX |
| maximal value control parameter More... | |
| static double | LAMBDA_UP |
| multiplication factor control parameter More... | |
| static double | LAMBDA_DOWN |
| multiplication factor control parameter More... | |
| static double | PIVOT |
| minimal value diagonal element of Hesse matrix More... | |
| static int | debug = 0 |
| debug level (default is off). More... | |
Definition at line 67 of file JPoint4DRegressor.hh.
|
inherited |
Definition at line 80 of file JRegressor.hh.
|
inherited |
Definition at line 81 of file JRegressor.hh.
|
inherited |
Definition at line 82 of file JRegressor.hh.
|
inherited |
Data type of fit parameter.
Definition at line 95 of file JGandalf.hh.
|
inline |
Constructor.
Definition at line 75 of file JPoint4DRegressor.hh.
|
inline |
Definition at line 89 of file JPoint4DRegressor.hh.
|
inlineinherited |
Global fit.
| value | start value |
| __begin | begin of data set |
| __end | end of data set |
Definition at line 94 of file JRegressor.hh.
|
inlineinherited |
Multi-dimensional fit of multiple data sets.
The fit function should return the chi2 as well as the partial derivatives for the current value of the model and a given data point.
| fit | fit function |
| __begin | begin of data |
| __end | end of data |
| args | optional data |
Definition at line 160 of file JGandalf.hh.
| JLANG::JSharedPointer<JMEstimator> JFIT::JRegressor< JPoint4D, JGandalf >::estimator |
M-Estimator function.
Definition at line 110 of file JPoint4DRegressor.hh.
| double JFIT::JRegressor< JPoint4D, JGandalf >::sigma |
Time resolution [ns].
Definition at line 111 of file JPoint4DRegressor.hh.
|
staticinherited |
maximal number of iterations
maximal number of iterations.
Definition at line 335 of file JGandalf.hh.
|
staticinherited |
maximal distance to minimum
maximal distance to minimum.
Definition at line 336 of file JGandalf.hh.
|
staticinherited |
minimal value control parameter
Definition at line 337 of file JGandalf.hh.
|
staticinherited |
maximal value control parameter
Definition at line 338 of file JGandalf.hh.
|
staticinherited |
multiplication factor control parameter
Definition at line 339 of file JGandalf.hh.
|
staticinherited |
multiplication factor control parameter
Definition at line 340 of file JGandalf.hh.
|
staticinherited |
minimal value diagonal element of Hesse matrix
minimal value diagonal element of matrix
Definition at line 341 of file JGandalf.hh.
|
inherited |
fit parameters
Definition at line 343 of file JGandalf.hh.
|
inherited |
number of iterations
Definition at line 344 of file JGandalf.hh.
|
inherited |
control parameter
Definition at line 345 of file JGandalf.hh.
|
inherited |
value
Definition at line 346 of file JGandalf.hh.
|
inherited |
error
Definition at line 347 of file JGandalf.hh.
|
inherited |
Hesse matrix.
Definition at line 348 of file JGandalf.hh.
|
inherited |
Definition at line 491 of file JGandalf.hh.
|
staticinherited |
debug level (default is off).
Definition at line 45 of file JMessage.hh.
 1.8.5
1.8.5