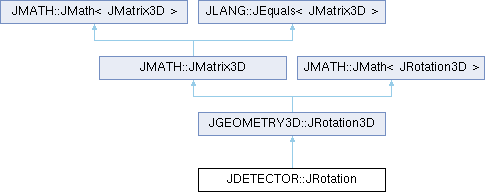
Auxiliary class to get rotation matrix between two optical modules.
More...
#include <JDetectorToolkit.hh>
|
| const JRotation3D & | operator() (const JModule &first, const JModule &second) |
| | Get rotation matrix to go from first to second module.
|
| |
| const JRotation3D & | getRotation () const |
| | Get rotation.
|
| |
| | operator JQuaternion3D () const |
| | Type conversion operator.
|
| |
| JRotation3D & | transpose () |
| | Transpose.
|
| |
| JRotation3D & | mul (const JRotation3D &A, const JRotation3D &B) |
| | Matrix multiplication.
|
| |
| JMatrix3D & | mul (const double factor) |
| | Scale matrix.
|
| |
| JMatrix3D & | mul (const JMatrix3D &A, const JMatrix3D &B) |
| | Matrix multiplication.
|
| |
| JMatrix3D & | mul (const JSecond_t &object) |
| | Multiply with object.
|
| |
| JFirst_t & | mul (const JSecond_t &object) |
| | Multiply with object.
|
| |
| void | rotate (double &__x, double &__y, double &__z) const |
| | Rotate.
|
| |
| void | rotate_back (double &__x, double &__y, double &__z) const |
| | Rotate back.
|
| |
| JMatrix3D & | setIdentity () |
| | Set to identity matrix.
|
| |
| void | set (const JMatrix3D &A) |
| | Set matrix.
|
| |
| JMatrix3D & | reset () |
| | Set matrix to the null matrix.
|
| |
| JMatrix3D & | negate () |
| | Negate matrix.
|
| |
| JMatrix3D & | add (const JMatrix3D &A) |
| | Matrix addition.
|
| |
| JMatrix3D & | sub (const JMatrix3D &A) |
| | Matrix subtraction.
|
| |
| JMatrix3D & | div (const double factor) |
| | Scale matrix.
|
| |
| bool | equals (const JMatrix3D &A, const double eps=std::numeric_limits< double >::min()) const |
| | Equality.
|
| |
| bool | isIdentity (const double eps=std::numeric_limits< double >::min()) const |
| | Test identity.
|
| |
| double | getDeterminant () const |
| | Get determinant of matrix.
|
| |
| void | transform (double &__x, double &__y, double &__z) const |
| | Transform.
|
| |
|
| bool | orthonormalise (const size_t index, const double precision=std::numeric_limits< double >::epsilon()) |
| | Put normalised primary direction at specified index and orthoganilise following directions.
|
| |
Auxiliary class to get rotation matrix between two optical modules.
Definition at line 668 of file JDetectorToolkit.hh.
◆ operator()()
Get rotation matrix to go from first to second module.
- Parameters
-
| first | first module |
| second | second module |
- Returns
- rotation matrix
Definition at line 682 of file JDetectorToolkit.hh.
683 {
685
686 if (first.size() == second.size()) {
687
688 const size_t N = first.size();
689
691
694
695 for (size_t i = 0; i != N; ++i) {
696 in [i] = first .getPMT(i).getDirection();
697 out[i] = second.getPMT(i).getDirection();
698 }
699
702 THROW(JException,
"Failure to orthonormalise direction " << i);
703 }
704 }
705
706 this->
a00 =
out[0].getX() *
in[0].getX() +
out[1].getX() *
in[1].getX() +
out[2].getX() *
in[2].getX();
707 this->
a01 =
out[0].getX() *
in[0].getY() +
out[1].getX() *
in[1].getY() +
out[2].getX() *
in[2].getY();
708 this->
a02 =
out[0].getX() *
in[0].getZ() +
out[1].getX() *
in[1].getZ() +
out[2].getX() *
in[2].getZ();
709
710 this->
a10 =
out[0].getY() *
in[0].getX() +
out[1].getY() *
in[1].getX() +
out[2].getY() *
in[2].getX();
711 this->
a11 =
out[0].getY() *
in[0].getY() +
out[1].getY() *
in[1].getY() +
out[2].getY() *
in[2].getY();
712 this->
a12 =
out[0].getY() *
in[0].getZ() +
out[1].getY() *
in[1].getZ() +
out[2].getY() *
in[2].getZ();
713
714 this->
a20 =
out[0].getZ() *
in[0].getX() +
out[1].getZ() *
in[1].getX() +
out[2].getZ() *
in[2].getX();
715 this->
a21 =
out[0].getZ() *
in[0].getY() +
out[1].getZ() *
in[1].getY() +
out[2].getZ() *
in[2].getY();
716 this->
a22 =
out[0].getZ() *
in[0].getZ() +
out[1].getZ() *
in[1].getZ() +
out[2].getZ() *
in[2].getZ();
717
718 } else {
719
721 }
722
723 } else {
724
725 THROW(JException,
"Module " << first.getID() <<
" size " << first.size() <<
" != " << second.size());
726 }
727
728 return *this;
729 }
#define THROW(JException_t, A)
Marco for throwing exception with std::ostream compatible message.
JMatrix3D & setIdentity()
Set to identity matrix.
std::vector< JVector3D > out
std::vector< JVector3D > in
bool orthonormalise(const size_t index, const double precision=std::numeric_limits< double >::epsilon())
Put normalised primary direction at specified index and orthoganilise following directions.
static const size_t NUMBER_OF_DIMENSIONS
Number of dimensions.
◆ orthonormalise()
| bool JDETECTOR::JRotation::orthonormalise |
( |
const size_t | index, |
|
|
const double | precision = std::numeric_limits<double>::epsilon() ) |
|
inlineprivate |
Put normalised primary direction at specified index and orthoganilise following directions.
This procedure follows Gram-Schmidt process.
- Parameters
-
| index | index |
| precision | precision |
- Returns
- true if primary direction exists; else false
Definition at line 740 of file JDetectorToolkit.hh.
741 {
743
744 size_t pos = index;
745
746 for (
size_t i = index + 1; i !=
in.size(); ++i) {
747 if (
in[i].getLengthSquared() >
in[pos].getLengthSquared()) {
748 pos = i;
749 }
750 }
751
752 const double u =
in[pos].getLength();
753
754 if (u > precision) {
755
758
759 if (pos != index) {
760 swap(
in [pos],
in [index]);
761 swap(
out[pos],
out[index]);
762 }
763
764 for (
size_t i = index + 1; i !=
in.size(); ++i) {
765
766 const double dot =
in[index].getDot(
in[i]);
767
768 in [i] -= dot *
in [index];
769 out[i] -= dot *
out[index];
770 }
771
772 return true;
773
774 } else {
775
776 return false;
777 }
778 }
◆ getRotation()
| const JRotation3D & JGEOMETRY3D::JRotation3D::getRotation |
( |
| ) |
const |
|
inlineinherited |
Get rotation.
- Returns
- rotation
Definition at line 272 of file JRotation3D.hh.
273 {
275 }
JRotation3D()
Default constructor (= identity matrix).
◆ operator JQuaternion3D()
Type conversion operator.
- Returns
- quaternion
Definition at line 283 of file JRotation3D.hh.
284 {
285 const double q2 = 0.25 * (1.0 +
a00 +
a11 +
a22);
286
287 if (q2 > 0.0) {
288
289 const double a = sqrt(q2);
290 const double w = 0.25 /
a;
291 const double b = (
a21 -
a12) * w;
292 const double c = (
a02 -
a20) * w;
293 const double d = (
a10 -
a01) * w;
294
295 return JQuaternion3D(a,b,c,d).normalise();
296 }
297
298 return JQuaternion3D(1.0, 0.0, 0.0, 0.0);
299 }
◆ transpose()
Transpose.
Definition at line 305 of file JRotation3D.hh.
306 {
307 static_cast<JMatrix3D&
>(*this).transpose();
308
309 return *this;
310 }
JMatrix3D()
Default constructor.
◆ mul() [1/5]
Matrix multiplication.
- Parameters
-
- Returns
- this matrix
Definition at line 320 of file JRotation3D.hh.
322 {
323 static_cast<JMatrix3D&
>(*this).mul(A, B);
324
325 return *this;
326 }
◆ mul() [2/5]
| JMatrix3D & JMATH::JMatrix3D::mul |
( |
const double | factor | ) |
|
|
inlineinherited |
Scale matrix.
- Parameters
-
- Returns
- this matrix * factor
Definition at line 208 of file JMath/JMatrix3D.hh.
209 {
210 a00 *= factor;
a01 *= factor;
a02 *= factor;
211 a10 *= factor;
a11 *= factor;
a12 *= factor;
212 a20 *= factor;
a21 *= factor;
a22 *= factor;
213
214 return *this;
215 }
◆ mul() [3/5]
Matrix multiplication.
- Parameters
-
- Returns
- this matrix
Definition at line 241 of file JMath/JMatrix3D.hh.
243 {
244 a00 = A.a00 * B.a00 + A.a01 * B.a10 + A.a02 * B.a20;
245 a01 = A.a00 * B.a01 + A.a01 * B.a11 + A.a02 * B.a21;
246 a02 = A.a00 * B.a02 + A.a01 * B.a12 + A.a02 * B.a22;
247
248 a10 = A.a10 * B.a00 + A.a11 * B.a10 + A.a12 * B.a20;
249 a11 = A.a10 * B.a01 + A.a11 * B.a11 + A.a12 * B.a21;
250 a12 = A.a10 * B.a02 + A.a11 * B.a12 + A.a12 * B.a22;
251
252 a20 = A.a20 * B.a00 + A.a21 * B.a10 + A.a22 * B.a20;
253 a21 = A.a20 * B.a01 + A.a21 * B.a11 + A.a22 * B.a21;
254 a22 = A.a20 * B.a02 + A.a21 * B.a12 + A.a22 * B.a22;
255
256 return *this;
257 }
◆ mul() [4/5]
Multiply with object.
- Parameters
-
- Returns
- result object
Definition at line 354 of file JMath.hh.
355 {
356 return static_cast<JFirst_t&>(*this) = JFirst_t().mul(static_cast<const JFirst_t&>(*this), object);
357 }
◆ mul() [5/5]
template<class JFirst_t , class JSecond_t >
| JFirst_t & JMATH::JMath< JFirst_t, JSecond_t >::mul |
( |
const JSecond_t & | object | ) |
|
|
inlineinherited |
Multiply with object.
- Parameters
-
- Returns
- result object
Definition at line 354 of file JMath.hh.
355 {
356 return static_cast<JFirst_t&>(*this) = JFirst_t().mul(static_cast<const JFirst_t&>(*this), object);
357 }
◆ rotate()
| void JGEOMETRY3D::JRotation3D::rotate |
( |
double & | __x, |
|
|
double & | __y, |
|
|
double & | __z ) const |
|
inlineinherited |
Rotate.
- Parameters
-
| __x | x value |
| __y | y value |
| __z | z value |
Definition at line 336 of file JRotation3D.hh.
337 {
338 const double x =
a00 * __x +
a01 * __y +
a02 * __z;
339 const double y =
a10 * __x +
a11 * __y +
a12 * __z;
340 const double z =
a20 * __x +
a21 * __y +
a22 * __z;
341
344 __z = z;
345 }
◆ rotate_back()
| void JGEOMETRY3D::JRotation3D::rotate_back |
( |
double & | __x, |
|
|
double & | __y, |
|
|
double & | __z ) const |
|
inlineinherited |
Rotate back.
- Parameters
-
| __x | x value |
| __y | y value |
| __z | z value |
Definition at line 355 of file JRotation3D.hh.
356 {
357 const double x =
a00 * __x +
a10 * __y +
a20 * __z;
358 const double y =
a01 * __x +
a11 * __y +
a21 * __z;
359 const double z =
a02 * __x +
a12 * __y +
a22 * __z;
360
363 __z = z;
364 }
◆ getInstance()
| static const JMatrix3D & JMATH::JMatrix3D::getInstance |
( |
| ) |
|
|
inlinestaticinherited |
Get reference to unique instance of this class object.
- Returns
- zero matrix
Definition at line 78 of file JMath/JMatrix3D.hh.
79 {
81
82 return matrix;
83 }
◆ setIdentity()
| JMatrix3D & JMATH::JMatrix3D::setIdentity |
( |
| ) |
|
|
inlineinherited |
Set to identity matrix.
- Returns
- this matrix
Definition at line 91 of file JMath/JMatrix3D.hh.
92 {
96
97 return *this;
98 }
◆ getIdentity()
| static const JMatrix3D & JMATH::JMatrix3D::getIdentity |
( |
| ) |
|
|
inlinestaticinherited |
Get reference to unique instance of this class object.
- Returns
- identity matrix
Definition at line 106 of file JMath/JMatrix3D.hh.
107 {
109
110 return matrix;
111 }
◆ set()
| void JMATH::JMatrix3D::set |
( |
const JMatrix3D & | A | ) |
|
|
inlineinherited |
◆ reset()
Set matrix to the null matrix.
- Returns
- this matrix
Definition at line 130 of file JMath/JMatrix3D.hh.
131 {
133
134 return *this;
135 }
◆ negate()
Negate matrix.
- Returns
- -this matrix
Definition at line 160 of file JMath/JMatrix3D.hh.
161 {
165
166 return *this;
167 }
◆ add()
Matrix addition.
- Parameters
-
- Returns
- this matrix + A
Definition at line 176 of file JMath/JMatrix3D.hh.
177 {
178 a00 += A.a00;
a01 += A.a01;
a02 += A.a02;
179 a10 += A.a10;
a11 += A.a11;
a12 += A.a12;
180 a20 += A.a20;
a21 += A.a21;
a22 += A.a22;
181
182 return *this;
183 }
◆ sub()
Matrix subtraction.
- Parameters
-
- Returns
- this matrix - A
Definition at line 192 of file JMath/JMatrix3D.hh.
193 {
194 a00 -= A.a00;
a01 -= A.a01;
a02 -= A.a02;
195 a10 -= A.a10;
a11 -= A.a11;
a12 -= A.a12;
196 a20 -= A.a20;
a21 -= A.a21;
a22 -= A.a22;
197
198 return *this;
199 }
◆ div()
| JMatrix3D & JMATH::JMatrix3D::div |
( |
const double | factor | ) |
|
|
inlineinherited |
Scale matrix.
- Parameters
-
- Returns
- this matrix / factor
Definition at line 224 of file JMath/JMatrix3D.hh.
225 {
226 a00 /= factor;
a01 /= factor;
a02 /= factor;
227 a10 /= factor;
a11 /= factor;
a12 /= factor;
228 a20 /= factor;
a21 /= factor;
a22 /= factor;
229
230 return *this;
231 }
◆ equals()
| bool JMATH::JMatrix3D::equals |
( |
const JMatrix3D & | A, |
|
|
const double | eps = std::numeric_limits<double>::min() ) const |
|
inlineinherited |
Equality.
- Parameters
-
| A | matrix |
| eps | numerical precision |
- Returns
- true if matrices identical; else false
Definition at line 267 of file JMath/JMatrix3D.hh.
269 {
270 return (fabs(
a00 - A.a00) <= eps &&
271 fabs(
a01 - A.a01) <= eps &&
272 fabs(
a02 - A.a02) <= eps &&
273 fabs(
a10 - A.a10) <= eps &&
274 fabs(
a11 - A.a11) <= eps &&
275 fabs(
a12 - A.a12) <= eps &&
276 fabs(
a20 - A.a20) <= eps &&
277 fabs(
a21 - A.a21) <= eps &&
278 fabs(
a22 - A.a22) <= eps);
279 }
◆ isIdentity()
| bool JMATH::JMatrix3D::isIdentity |
( |
const double | eps = std::numeric_limits<double>::min() | ) |
const |
|
inlineinherited |
Test identity.
- Parameters
-
- Returns
- true if identity matrix; else false
Definition at line 288 of file JMath/JMatrix3D.hh.
289 {
291 }
static const JMatrix3D & getIdentity()
Get reference to unique instance of this class object.
bool equals(const JMatrix3D &A, const double eps=std::numeric_limits< double >::min()) const
Equality.
◆ getDeterminant()
| double JMATH::JMatrix3D::getDeterminant |
( |
| ) |
const |
|
inlineinherited |
Get determinant of matrix.
- Returns
- determinant of matrix
Definition at line 299 of file JMath/JMatrix3D.hh.
300 {
301 double det = 0.0;
302
306
307 return det;
308 }
◆ transform()
| void JMATH::JMatrix3D::transform |
( |
double & | __x, |
|
|
double & | __y, |
|
|
double & | __z ) const |
|
inlineinherited |
Transform.
- Parameters
-
| __x | x value |
| __y | y value |
| __z | z value |
Definition at line 318 of file JMath/JMatrix3D.hh.
319 {
320 const double x =
a00 * __x +
a01 * __y +
a02 * __z;
321 const double y =
a10 * __x +
a11 * __y +
a12 * __z;
322 const double z =
a20 * __x +
a21 * __y +
a22 * __z;
323
326 __z = z;
327 }
◆ NUMBER_OF_DIMENSIONS
| const size_t JDETECTOR::JRotation::NUMBER_OF_DIMENSIONS = 3 |
|
static |
◆ in
◆ out
◆ a00
| double JMATH::JMatrix3D::a00 |
|
inherited |
◆ a01
| double JMATH::JMatrix3D::a01 |
|
inherited |
◆ a02
| double JMATH::JMatrix3D::a02 |
|
inherited |
◆ a10
| double JMATH::JMatrix3D::a10 |
|
inherited |
◆ a11
| double JMATH::JMatrix3D::a11 |
|
inherited |
◆ a12
| double JMATH::JMatrix3D::a12 |
|
inherited |
◆ a20
| double JMATH::JMatrix3D::a20 |
|
inherited |
◆ a21
| double JMATH::JMatrix3D::a21 |
|
inherited |
◆ a22
| double JMATH::JMatrix3D::a22 |
|
inherited |
The documentation for this struct was generated from the following file: