Data structure for compass in three dimensions. More...
#include <JCompass.hh>
Public Member Functions | |
| JCompass () | |
| Default constructor. | |
| JCompass (const double yaw, const double pitch, const double roll) | |
| Constructor. | |
| JCompass (const JAHRS &data, const JAHRSCalibration &calibration) | |
| Constructor. | |
| JCompass (const JQuaternion3D &Q) | |
| Constructor. | |
| const JCompass & | getCompass () const |
| Get compass. | |
| void | setCompass (const JCompass &compass) |
| Set compass. | |
| JRotation3D | getRotation () const |
| Get rotation matrix. | |
| JQuaternion3D | getQuaternion () const |
| Get quaternion. | |
| double | getYaw () const |
| Get yaw compass. | |
| double | getPitch () const |
| Get pitch compass. | |
| double | getRoll () const |
| Get roll compass. | |
| bool | equals (const JCompass &compass, const double precision=std::numeric_limits< double >::min()) const |
| Check equality. | |
| void | correct (const double declination, const double meridian) |
| Correct compass for magnetic declination and meridian convergence angle. | |
Protected Attributes | |
| double | yaw |
| double | pitch |
| double | roll |
Friends | |
| std::istream & | operator>> (std::istream &in, JCompass &compass) |
| Read compasss from input. | |
| std::ostream & | operator<< (std::ostream &out, const JCompass &compass) |
| Write compasss to output. | |
| JReader & | operator>> (JReader &in, JCompass &compass) |
| Read compasss from input. | |
| JWriter & | operator<< (JWriter &out, const JCompass &compass) |
| Write compasss to output. | |
Detailed Description
Data structure for compass in three dimensions.
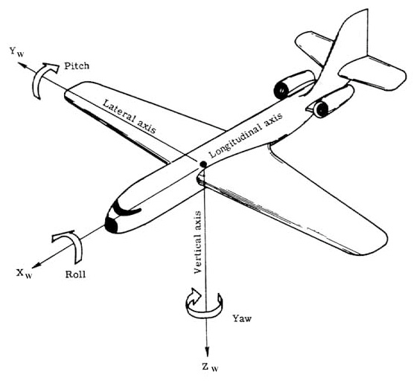
Note that the z-axis of the KM3NeT reference system points up.
So, the yaw angle, measured by the compass is measured from North to East (since in the compass system z-axis points down).
Note also that the sign of the angle JCompass::pitch is maintained and the signs of the angles JCompass::yaw and JCompass::roll inverted when converting to/from a rotation matrix or quaternion.
This class implements the JMATH::JMath and JLANG::JEquals interfaces.
Definition at line 49 of file JCompass.hh.
Constructor & Destructor Documentation
◆ JCompass() [1/4]
|
inline |
Default constructor.
Definition at line 56 of file JCompass.hh.
◆ JCompass() [2/4]
|
inline |
◆ JCompass() [3/4]
|
inline |
Constructor.
- Parameters
-
data AHRS data calibration AHRS calibration
Definition at line 85 of file JCompass.hh.
◆ JCompass() [4/4]
|
inline |
Constructor.
- Parameters
-
Q quaternion
Definition at line 135 of file JCompass.hh.
Member Function Documentation
◆ getCompass()
|
inline |
◆ setCompass()
|
inline |
◆ getRotation()
|
inline |
Get rotation matrix.
- Returns
- rotation matrix
Definition at line 184 of file JCompass.hh.
◆ getQuaternion()
|
inline |
Get quaternion.
- Returns
- quaternion
Definition at line 201 of file JCompass.hh.
◆ getYaw()
|
inline |
◆ getPitch()
|
inline |
◆ getRoll()
|
inline |
◆ equals()
|
inline |
Check equality.
- Parameters
-
compass compass precision numerical precision
- Returns
- true if compass's are equal; else false
Definition at line 259 of file JCompass.hh.
◆ correct()
|
inline |
Correct compass for magnetic declination and meridian convergence angle.
- Parameters
-
declination magnetic declination [rad] meridian meridian convergence angle [rad]
Definition at line 274 of file JCompass.hh.
Friends And Related Symbol Documentation
◆ operator>> [1/2]
|
friend |
Read compasss from input.
- Parameters
-
in input stream compass compasss
- Returns
- input stream
Definition at line 288 of file JCompass.hh.
◆ operator<< [1/2]
|
friend |
Write compasss to output.
- Parameters
-
out output stream compass compass
- Returns
- output stream
Definition at line 303 of file JCompass.hh.
◆ operator>> [2/2]
Read compasss from input.
- Parameters
-
in reader compass compasss
- Returns
- reader
Definition at line 318 of file JCompass.hh.
◆ operator<< [2/2]
Write compasss to output.
- Parameters
-
out writer compass compasss
- Returns
- writer
Definition at line 335 of file JCompass.hh.
Member Data Documentation
◆ yaw
|
protected |
Definition at line 346 of file JCompass.hh.
◆ pitch
|
protected |
Definition at line 347 of file JCompass.hh.
◆ roll
|
protected |
Definition at line 348 of file JCompass.hh.
The documentation for this class was generated from the following file:
Generated by