A photon path. More...
#include <JPhotonPath.hh>
Public Member Functions | |
| JPhotonPath () | |
| default constructor | |
| JPhotonPath (int _nscat) | |
| constructor to actually be used | |
| string | getString () |
| get a string with the path vertex positions | |
| double | getLength () |
| get the total path length | |
| void | addVertex () |
| void | addVertex (JPosition3D &pos) |
| bool | hitsSphere (const JPosition3D &pos, double r) |
| Returns whether the photon path intersects a sphere of radius r at position pos. | |
| JPosition3D | getSphereHitPosition (const JPosition3D &pos, double r) |
| Returns the position where the photon hits a sphere of radius r at position pos. If the photon does not hit, it returns (0,0,0). | |
| std::vector< JPosition3D > | getPointsWithX (double x) |
| return all coordinates where the photon path has the given x | |
| std::vector< JPosition3D > | getPointsWithY (double y) |
| return all coordinates where the photon path has the given y | |
| std::vector< JPosition3D > | getPointsWithZ (double z) |
| return all coordinates where the photon path has the given z | |
| JIO::JReader & | read (JIO::JReader &in) |
| Read from input. | |
| JIO::JWriter & | write (JIO::JWriter &out) const |
| Write to output. | |
| const JPolyline3D & | getPolyline () const |
| Get polyline. | |
| JPolyline3D & | getPolyline () |
| Get polyline. | |
| JPolyline3D & | transform (const JMatrix3D &T) |
| Transform all vertices. | |
| void | transform (const JRotation3D &R, const JVector3D &pos) |
| Transform all vertices of the polyline with a rotation and offset. | |
| JPolyline3D & | rotate (const JRotation3D &R) |
| Rotate all vertices. | |
| JPolyline3D & | rotate (const JRotation3X &R) |
| Rotate all vertices around X-axis. | |
| JPolyline3D & | rotate (const JRotation3Y &R) |
| Rotate all vertices around Y-axis. | |
| JPolyline3D & | rotate (const JRotation3Z &R) |
| Rotate all vertices around Z-axis. | |
| JPolyline3D & | rotate_back (const JRotation3D &R) |
| Rotate back all vertices. | |
| JPolyline3D & | rotate_back (const JRotation3X &R) |
| Rotate all vertices back around X-axis. | |
| JPolyline3D & | rotate_back (const JRotation3Y &R) |
| Rotate all vertices back around Y-axis. | |
| JPolyline3D & | rotate_back (const JRotation3Z &R) |
| Rotate all vertices back around Z-axis. | |
| void | transform_back (const JRotation3D &R, const JVector3D &pos) |
| Transform back all vertices of the polyline. | |
Public Attributes | |
| int | n |
| double | weight |
Detailed Description
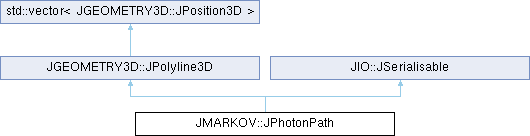
A photon path.
This is basically a JPolyline3D with at least two vertices and a weight.
Definition at line 38 of file JPhotonPath.hh.
Constructor & Destructor Documentation
◆ JPhotonPath() [1/2]
|
inline |
◆ JPhotonPath() [2/2]
|
inline |
constructor to actually be used
Definition at line 45 of file JPhotonPath.hh.
Member Function Documentation
◆ getString()
| string JMARKOV::JPhotonPath::getString | ( | ) |
get a string with the path vertex positions
Definition at line 136 of file JPhotonPath.hh.
◆ getLength()
| double JMARKOV::JPhotonPath::getLength | ( | ) |
get the total path length
Definition at line 104 of file JPhotonPath.hh.
◆ addVertex() [1/2]
|
inline |
Definition at line 53 of file JPhotonPath.hh.
◆ addVertex() [2/2]
| void JMARKOV::JPhotonPath::addVertex | ( | JPosition3D & | pos | ) |
Definition at line 116 of file JPhotonPath.hh.
◆ hitsSphere()
| bool JMARKOV::JPhotonPath::hitsSphere | ( | const JPosition3D & | pos, |
| double | r ) |
Returns whether the photon path intersects a sphere of radius r at position pos.
Definition at line 176 of file JPhotonPath.hh.
◆ getSphereHitPosition()
| JPosition3D JMARKOV::JPhotonPath::getSphereHitPosition | ( | const JPosition3D & | pos, |
| double | r ) |
Returns the position where the photon hits a sphere of radius r at position pos. If the photon does not hit, it returns (0,0,0).
Definition at line 213 of file JPhotonPath.hh.
◆ getPointsWithX()
| std::vector< JPosition3D > JMARKOV::JPhotonPath::getPointsWithX | ( | double | x | ) |
return all coordinates where the photon path has the given x
Definition at line 121 of file JPhotonPath.hh.
◆ getPointsWithY()
| std::vector< JPosition3D > JMARKOV::JPhotonPath::getPointsWithY | ( | double | y | ) |
return all coordinates where the photon path has the given y
Definition at line 145 of file JPhotonPath.hh.
◆ getPointsWithZ()
| std::vector< JPosition3D > JMARKOV::JPhotonPath::getPointsWithZ | ( | double | z | ) |
return all coordinates where the photon path has the given z
Definition at line 160 of file JPhotonPath.hh.
◆ read()
|
inlinevirtual |
Read from input.
- Parameters
-
in JReader
- Returns
- JReader
Implements JIO::JSerialisable.
Definition at line 75 of file JPhotonPath.hh.
◆ write()
|
inlinevirtual |
Write to output.
- Parameters
-
out JWriter
- Returns
- JWriter
Implements JIO::JSerialisable.
Definition at line 88 of file JPhotonPath.hh.
◆ getPolyline() [1/2]
|
inlineinherited |
◆ getPolyline() [2/2]
|
inlineinherited |
◆ transform() [1/2]
|
inlineinherited |
Transform all vertices.
- Parameters
-
T matrix
Definition at line 62 of file JPolyline3D.hh.
◆ transform() [2/2]
|
inlineinherited |
Transform all vertices of the polyline with a rotation and offset.
See the corresponding function in JPosition3D for more information
- Parameters
-
R rotation matrix pos position of origin (after rotation)
Definition at line 157 of file JPolyline3D.hh.
◆ rotate() [1/4]
|
inlineinherited |
Rotate all vertices.
- Parameters
-
R rotation matrix
Definition at line 72 of file JPolyline3D.hh.
◆ rotate() [2/4]
|
inlineinherited |
Rotate all vertices around X-axis.
- Parameters
-
R rotation matrix
Definition at line 93 of file JPolyline3D.hh.
◆ rotate() [3/4]
|
inlineinherited |
Rotate all vertices around Y-axis.
- Parameters
-
R rotation matrix
Definition at line 114 of file JPolyline3D.hh.
◆ rotate() [4/4]
|
inlineinherited |
Rotate all vertices around Z-axis.
- Parameters
-
R rotation matrix
Definition at line 135 of file JPolyline3D.hh.
◆ rotate_back() [1/4]
|
inlineinherited |
Rotate back all vertices.
- Parameters
-
R rotation matrix
Definition at line 83 of file JPolyline3D.hh.
◆ rotate_back() [2/4]
|
inlineinherited |
Rotate all vertices back around X-axis.
- Parameters
-
R rotation matrix
Definition at line 103 of file JPolyline3D.hh.
◆ rotate_back() [3/4]
|
inlineinherited |
Rotate all vertices back around Y-axis.
- Parameters
-
R rotation matrix
Definition at line 125 of file JPolyline3D.hh.
◆ rotate_back() [4/4]
|
inlineinherited |
Rotate all vertices back around Z-axis.
- Parameters
-
R rotation matrix
Definition at line 145 of file JPolyline3D.hh.
◆ transform_back()
|
inlineinherited |
Transform back all vertices of the polyline.
- Parameters
-
R rotation matrix pos polyline of origin (before rotation)
Definition at line 167 of file JPolyline3D.hh.
Member Data Documentation
◆ n
| int JMARKOV::JPhotonPath::n |
Definition at line 100 of file JPhotonPath.hh.
◆ weight
| double JMARKOV::JPhotonPath::weight |
Definition at line 101 of file JPhotonPath.hh.
The documentation for this class was generated from the following file:
Generated by