Data frame for calibrated hits of one PMT. More...
#include <JFrame.hh>
Public Types | |
| typedef std::vector< JElement_t, JAllocator_t > | container_type |
| typedef JElement_t | value_type |
| typedef JMatch< value_type > | match_type |
| typedef container_type::iterator | iterator |
| typedef container_type::const_iterator | const_iterator |
| typedef container_type::reverse_iterator | reverse_iterator |
| typedef container_type::const_reverse_iterator | const_reverse_iterator |
Public Member Functions | |
| JFrame () | |
| Default constructor. More... | |
| JFrame (const JDAQChronometer &chronometer, const JDAQPMTIdentifier &id, const JAxis3D &axis, const JCalibration &calibration) | |
| Constructor. More... | |
| void | push_back (const JDAQHit &hit) |
| Append DAQ hit. More... | |
| void | putEndMarker () |
| Append end marker to data. More... | |
| const_iterator | u_begin () const |
| iterator without end marker More... | |
| const_iterator | u_end () const |
| iterator without end marker More... | |
| iterator | u_begin () |
| iterator without end marker More... | |
| iterator | u_end () |
| iterator without end marker More... | |
| const_reverse_iterator | u_rbegin () const |
| iterator without end marker More... | |
| const_reverse_iterator | u_rend () const |
| iterator without end marker More... | |
| reverse_iterator | u_rbegin () |
| iterator without end marker More... | |
| reverse_iterator | u_rend () |
| iterator without end marker More... | |
| size_t | u_size () const |
| size without end marker More... | |
| void | reset () |
| Reset. More... | |
| void | applyHighRateVeto (const double rate_Hz) |
| Apply high-rate veto. More... | |
| void | join (const match_type &match) |
| Join consecutive hits when matched according given criterion. More... | |
| void | filter (const match_type &match) |
| Filter-out consecutive hits when matched according given criterion. More... | |
| const JPMTHeader & | getPMTHeader () const |
| Get PMT header. More... | |
| void | setPMTHeader (const JPMTHeader &header) |
| Set PMT header. More... | |
| const JDAQChronometer & | getDAQChronometer () const |
| Get DAQ chronometer. More... | |
| void | setDAQChronometer (const JDAQChronometer &chronometer) |
| Set DAQ chronometer. More... | |
| int | getDetectorID () const |
| Get detector identifier. More... | |
| int | getRunNumber () const |
| Get run number. More... | |
| int | getFrameIndex () const |
| Get frame index. More... | |
| JDAQUTCExtended | getTimesliceStart () const |
| Get start of timeslice. More... | |
| void | setRunNumber (const int run) |
| Set run number. More... | |
| void | setFrameIndex (const int frame_index) |
| Set frame index. More... | |
| void | setTimesliceStart (const JDAQUTCExtended ×lice_start) |
| Set timeslice start time. More... | |
| ClassDef (JDAQChronometer, 3) | |
| const JDAQPMTIdentifier & | getPMTIdentifier () const |
| Get PMT identifier. More... | |
| void | setPMTIdentifier (const JDAQPMTIdentifier &pmt) |
| Set PMT identifier. More... | |
| int | getPMTAddress () const |
| Get PMT identifier. More... | |
| ClassDefNV (JDAQPMTIdentifier, 1) | |
| ClassDefNV (JDAQModuleIdentifier, 1) | |
| const JDAQModuleIdentifier & | getModuleIdentifier () const |
| Get Module identifier. More... | |
| void | setModuleIdentifier (const JDAQModuleIdentifier &module) |
| Set Module identifier. More... | |
| int | getModuleID () const |
| Get module identifier. More... | |
| const JAxis3D & | getAxis () const |
| Get axis. More... | |
| void | setAxis (const JAxis3D &axis) |
| Set axis. More... | |
| JAxis3D & | negate () |
| Negate axis. More... | |
| void | move (const double step) |
| Move vertex along this axis. More... | |
| double | getIntersection (const JVector3D &pos) const |
| Get longitudinal position along axis of position of closest approach with given position. More... | |
| double | getIntersection (const JAxis3D &axis, const double precision=1.0e-8) const |
| Get longitudinal position along axis of position of closest approach with given axis. More... | |
| double | getDistanceSquared (const JVector3D &pos) const |
| Get distance squared. More... | |
| double | getDistance (const JVector3D &pos) const |
| Get distance. More... | |
| JAxis3D & | rotate (const JRotation3D &R) |
| Rotate axis. More... | |
| JAxis3D & | rotate (const JRotation3X &R) |
| Rotate around X-axis. More... | |
| JAxis3D & | rotate (const JRotation3Y &R) |
| Rotate around Y-axis. More... | |
| JAxis3D & | rotate (const JRotation3Z &R) |
| Rotate around Z-axis. More... | |
| JAxis3D & | rotate (const JQuaternion3D &Q) |
| Rotate axis. More... | |
| JAxis3D & | rotate_back (const JRotation3D &R) |
| Rotate back axis. More... | |
| JAxis3D & | rotate_back (const JRotation3X &R) |
| Rotate back around X-axis. More... | |
| JAxis3D & | rotate_back (const JRotation3Y &R) |
| Rotate back around Y-axis. More... | |
| JAxis3D & | rotate_back (const JRotation3Z &R) |
| Rotate back around Z-axis. More... | |
| JPosition3D & | rotate_back (const JQuaternion3D &Q) |
| Rotate back. More... | |
| JDirection3D & | rotate_back (const JQuaternion3D &Q) |
| Rotate back. More... | |
| void | transform (const JAxis3D &axis) |
| Transform axis to reference frame of given axis. More... | |
| void | transform (const JRotation3D &R, const JVector3D &pos) |
| Transform axis. More... | |
| void | transform (const JTransformation3D &T) |
| Transform axis. More... | |
| JVector3D & | transform (const JMatrix3D &T) |
| Transform. More... | |
| JVector3D & | transform (const JMatrix3D &T) |
| Transform. More... | |
| JDirection3D & | transform (const JMatrix3D &T) |
| Transform. More... | |
| void | transform_back (const JRotation3D &R, const JVector3D &pos) |
| Transform back axis. More... | |
| void | transform_back (const JTransformation3D &T) |
| Transform back axis. More... | |
| double | getDot (const JAngle3D &angle) const |
| Get dot product. More... | |
| double | getDot (const JVector3D &pos) const |
| Get dot product. More... | |
| double | getDot (const JVersor3Z &dir) const |
| Get dot product. More... | |
| double | getDot (const JAngle3D &angle) const |
| Get dot product. More... | |
| double | getDot (const JVersor3D &dir) const |
| Get dot product. More... | |
| double | getDot (const JVersor3Z &dir) const |
| Get dot product. More... | |
| double | getDot (const JVector3D &vector) const |
| Get dot product. More... | |
| double | getDot (const JAngle3D &angle) const |
| Get dot product. More... | |
| double | getDot (const JVector3D &pos) const |
| Get dot product. More... | |
| double | getDot (const JVersor3Z &dir) const |
| Get dot product. More... | |
| double | getDot (const JVersor3D &versor) const |
| Get dot product. More... | |
| const JPosition3D & | getPosition () const |
| Get position. More... | |
| JPosition3D & | getPosition () |
| Get position. More... | |
| void | setPosition (const JVector3D &pos) |
| Set position. More... | |
| operator JAngle3D () const | |
| Type conversion operator. More... | |
| operator JAngle3D () const | |
| Type conversion operator. More... | |
| operator JVersor3D () const | |
| Type conversion operator. More... | |
| operator JVector2D () const | |
| Type conversion operator. More... | |
| double | getX () const |
| Get x position. More... | |
| double | getY () const |
| Get y position. More... | |
| double | getZ () const |
| Get z position. More... | |
| JVector3D & | add (const JVector3D &vector) |
| Add vector. More... | |
| JVector3D & | sub (const JVector3D &vector) |
| Subtract vector. More... | |
| JVector3D & | mul (const double factor) |
| Scale vector. More... | |
| JVector3D & | mul (const JSecond_t &object) |
| Multiply with object. More... | |
| JVersor3D & | mul (const JSecond_t &object) |
| Multiply with object. More... | |
| JVector3D & | div (const double factor) |
| Scale vector. More... | |
| bool | equals (const JVector3D &vector, const double precision=std::numeric_limits< double >::min()) const |
| Check equality. More... | |
| bool | equals (const JVersor3D &versor, const double precision=std::numeric_limits< double >::min()) const |
| Check equality. More... | |
| double | getLengthSquared () const |
| Get length squared. More... | |
| double | getLength () const |
| Get length. More... | |
| JVector3D & | cross (const JVector3D &first, const JVector3D &second) |
| Get cross product. More... | |
| const JDirection3D & | getDirection () const |
| Get direction. More... | |
| JDirection3D & | getDirection () |
| Get direction. More... | |
| void | setDirection (const JDirection3D &dir) |
| Set direction. More... | |
| operator JVector3D () const | |
| Type conversion operator. More... | |
| double | getDX () const |
| Get x direction. More... | |
| double | getDY () const |
| Get y direction. More... | |
| double | getDZ () const |
| Get z direction. More... | |
| double | getTheta () const |
| Get theta angle. More... | |
| double | getPhi () const |
| Get phi angle. More... | |
| JVersor3D & | normalise () |
| Normalise versor. More... | |
| const JCalibration & | getCalibration () const |
| Get calibration. More... | |
| void | setCalibration (const JCalibration &cal) |
| Set calibration. More... | |
| double | getT0 () const |
| Get time offset. More... | |
| void | setT0 (const double t0) |
| Set time offset. More... | |
| void | addT0 (const double t0) |
| Add time offset. More... | |
| void | subT0 (const double t0) |
| Subtract time offset. More... | |
Static Public Member Functions | |
| static bool | compare (const JDAQPMTIdentifier &first, const JDAQPMTIdentifier &second) |
| Compare PMT identifiers. More... | |
Protected Attributes | |
| int | detector_id |
| int | run |
| int | frame_index |
| JDAQUTCExtended | timeslice_start |
| int | address |
| int | id |
| double | __x |
| double | __y |
| double | __z |
| double | __dx |
| double | __dy |
| double | __dz |
| double | t0 |
Detailed Description
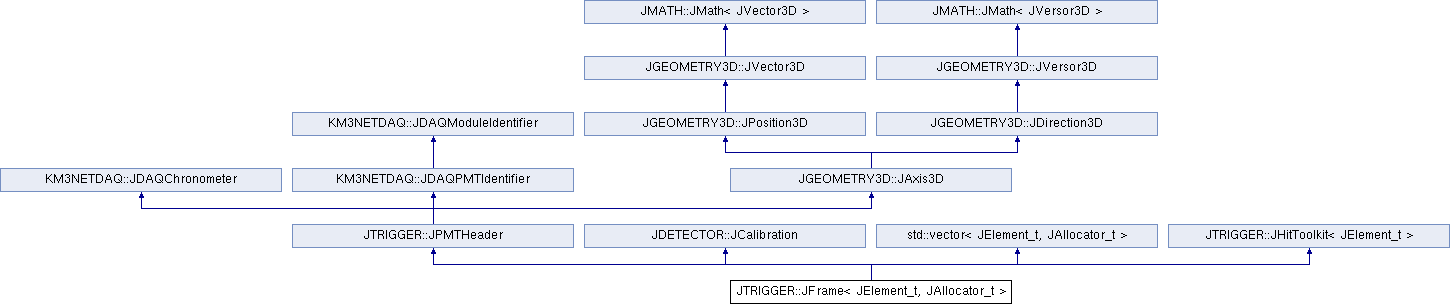
template<class JElement_t, class JAllocator_t = std::allocator<JElement_t>>
class JTRIGGER::JFrame< JElement_t, JAllocator_t >
Data frame for calibrated hits of one PMT.
Note that the calibration is applied on the fly in the method JFrame::push_back.
Member Typedef Documentation
◆ container_type
| typedef std::vector<JElement_t, JAllocator_t> JTRIGGER::JFrame< JElement_t, JAllocator_t >::container_type |
◆ value_type
| typedef JElement_t JTRIGGER::JFrame< JElement_t, JAllocator_t >::value_type |
◆ match_type
| typedef JMatch<value_type> JTRIGGER::JFrame< JElement_t, JAllocator_t >::match_type |
◆ iterator
| typedef container_type::iterator JTRIGGER::JFrame< JElement_t, JAllocator_t >::iterator |
◆ const_iterator
| typedef container_type::const_iterator JTRIGGER::JFrame< JElement_t, JAllocator_t >::const_iterator |
◆ reverse_iterator
| typedef container_type::reverse_iterator JTRIGGER::JFrame< JElement_t, JAllocator_t >::reverse_iterator |
◆ const_reverse_iterator
| typedef container_type::const_reverse_iterator JTRIGGER::JFrame< JElement_t, JAllocator_t >::const_reverse_iterator |
Constructor & Destructor Documentation
◆ JFrame() [1/2]
|
inline |
◆ JFrame() [2/2]
|
inline |
Member Function Documentation
◆ push_back()
|
inline |
Append DAQ hit.
The time calibration is applied before the hit is appended.
- Parameters
-
hit DAQ hit
◆ putEndMarker()
|
inline |
◆ u_begin() [1/2]
|
inline |
◆ u_end() [1/2]
|
inline |
◆ u_begin() [2/2]
|
inline |
◆ u_end() [2/2]
|
inline |
◆ u_rbegin() [1/2]
|
inline |
◆ u_rend() [1/2]
|
inline |
◆ u_rbegin() [2/2]
|
inline |
◆ u_rend() [2/2]
|
inline |
◆ u_size()
|
inline |
◆ reset()
|
inline |
Reset.
The contents of this frame are reduced to a single end marker.
◆ applyHighRateVeto()
|
inline |
◆ join()
|
inline |
◆ filter()
|
inline |
◆ getPMTHeader()
|
inlineinherited |
◆ setPMTHeader()
|
inlineinherited |
◆ getDAQChronometer()
|
inlineinherited |
◆ setDAQChronometer()
|
inlineinherited |
Set DAQ chronometer.
- Parameters
-
chronometer DAQ chronometer
Definition at line 99 of file JDAQChronometer.hh.
◆ getDetectorID()
|
inlineinherited |
Get detector identifier.
- Returns
- detector identifier
Definition at line 110 of file JDAQChronometer.hh.
◆ getRunNumber()
|
inlineinherited |
◆ getFrameIndex()
|
inlineinherited |
◆ getTimesliceStart()
|
inlineinherited |
◆ setRunNumber()
|
inlineinherited |
◆ setFrameIndex()
|
inlineinherited |
Set frame index.
- Parameters
-
frame_index frame index
Definition at line 166 of file JDAQChronometer.hh.
◆ setTimesliceStart()
|
inlineinherited |
Set timeslice start time.
- Parameters
-
timeslice_start timeslice start time
Definition at line 177 of file JDAQChronometer.hh.
◆ ClassDef()
|
inherited |
◆ getPMTIdentifier()
|
inlineinherited |
◆ setPMTIdentifier()
|
inlineinherited |
Set PMT identifier.
- Parameters
-
pmt PMT identifier
Definition at line 67 of file JDAQPMTIdentifier.hh.
◆ getPMTAddress()
|
inlineinherited |
◆ compare()
|
inlinestaticinherited |
Compare PMT identifiers.
The comparison is applied to the module identifer and to the PMT address. If the module identifier or PMT address is -1, the corresponding comparison evaluates to true.
- Parameters
-
first PMT identifier second PMT identifier
- Returns
- true if first PMT equal second PMT; else false
Definition at line 126 of file JDAQPMTIdentifier.hh.
◆ ClassDefNV() [1/2]
|
inherited |
◆ ClassDefNV() [2/2]
|
inherited |
◆ getModuleIdentifier()
|
inlineinherited |
Get Module identifier.
- Returns
- Module identifier
Definition at line 50 of file JDAQModuleIdentifier.hh.
◆ setModuleIdentifier()
|
inlineinherited |
Set Module identifier.
- Parameters
-
module Module identifier
Definition at line 61 of file JDAQModuleIdentifier.hh.
◆ getModuleID()
|
inlineinherited |
Get module identifier.
- Returns
- module identifier
Definition at line 72 of file JDAQModuleIdentifier.hh.
◆ getAxis()
|
inlineinherited |
◆ setAxis()
|
inlineinherited |
◆ negate()
|
inlineinherited |
◆ move()
|
inlineinherited |
◆ getIntersection() [1/2]
|
inlineinherited |
Get longitudinal position along axis of position of closest approach with given position.
- Parameters
-
pos position
- Returns
- longitudinal position
Definition at line 157 of file JAxis3D.hh.
◆ getIntersection() [2/2]
|
inlineinherited |
Get longitudinal position along axis of position of closest approach with given axis.
If the axes are paralel, this position corresponds to the vertex of the given axis.
- Parameters
-
axis axis precision precision
- Returns
- longitudinal position
Definition at line 175 of file JAxis3D.hh.
◆ getDistanceSquared()
|
inlineinherited |
Get distance squared.
- Parameters
-
pos position
- Returns
- square of distance
Definition at line 206 of file JAxis3D.hh.
◆ getDistance()
|
inlineinherited |
◆ rotate() [1/5]
|
inlineinherited |
Rotate axis.
- Parameters
-
R rotation matrix
- Returns
- this axis
Definition at line 236 of file JAxis3D.hh.
◆ rotate() [2/5]
|
inlineinherited |
Rotate around X-axis.
- Parameters
-
R rotation matrix
- Returns
- this axis
Definition at line 266 of file JAxis3D.hh.
◆ rotate() [3/5]
|
inlineinherited |
Rotate around Y-axis.
- Parameters
-
R rotation matrix
- Returns
- this axis
Definition at line 296 of file JAxis3D.hh.
◆ rotate() [4/5]
|
inlineinherited |
Rotate around Z-axis.
- Parameters
-
R rotation matrix
- Returns
- this axis
Definition at line 326 of file JAxis3D.hh.
◆ rotate() [5/5]
|
inlineinherited |
◆ rotate_back() [1/6]
|
inlineinherited |
Rotate back axis.
- Parameters
-
R rotation matrix
- Returns
- this axis
Definition at line 251 of file JAxis3D.hh.
◆ rotate_back() [2/6]
|
inlineinherited |
Rotate back around X-axis.
- Parameters
-
R rotation matrix
- Returns
- this axis
Definition at line 281 of file JAxis3D.hh.
◆ rotate_back() [3/6]
|
inlineinherited |
Rotate back around Y-axis.
- Parameters
-
R rotation matrix
- Returns
- this axis
Definition at line 311 of file JAxis3D.hh.
◆ rotate_back() [4/6]
|
inlineinherited |
Rotate back around Z-axis.
- Parameters
-
R rotation matrix
- Returns
- his axis
Definition at line 341 of file JAxis3D.hh.
◆ rotate_back() [5/6]
|
inlineinherited |
Rotate back.
- Parameters
-
Q quaternion
- Returns
- this position
Definition at line 311 of file JPosition3D.hh.
◆ rotate_back() [6/6]
|
inlineinherited |
Rotate back.
- Parameters
-
Q quaternion
- Returns
- this position
Definition at line 319 of file JDirection3D.hh.
◆ transform() [1/6]
|
inlineinherited |
Transform axis to reference frame of given axis.
- Parameters
-
axis axis
Definition at line 370 of file JAxis3D.hh.
◆ transform() [2/6]
|
inlineinherited |
Transform axis.
The final position and direction are obtained as follows:
- rotation of the position and the direction according rotation matrix (
R); - offset position with position of origin in rotated system (
pos); - rotation of position and direction around z-axis, such that final position is in x-z plane;
- Parameters
-
R rotation matrix pos position of origin
Definition at line 390 of file JAxis3D.hh.
◆ transform() [3/6]
|
inlineinherited |
◆ transform() [4/6]
|
inlineinherited |
◆ transform() [5/6]
◆ transform() [6/6]
|
inlineinherited |
◆ transform_back() [1/2]
|
inlineinherited |
Transform back axis.
The final position and direction are obtained as follows:
- offset position with position pos;
- rotation of position and direction according matrix R;
- Parameters
-
R rotation matrix pos position of origin (before rotation)
Definition at line 426 of file JAxis3D.hh.
◆ transform_back() [2/2]
|
inlineinherited |
◆ getDot() [1/11]
|
inlineinherited |
Get dot product.
- Parameters
-
angle angle
- Returns
- dot product
Definition at line 333 of file JDirection3D.hh.
◆ getDot() [2/11]
|
inlineinherited |
Get dot product.
- Parameters
-
pos position
- Returns
- dot product
Definition at line 348 of file JDirection3D.hh.
◆ getDot() [3/11]
|
inlineinherited |
Get dot product.
- Parameters
-
dir direction
- Returns
- dot product
Definition at line 363 of file JDirection3D.hh.
◆ getDot() [4/11]
|
inlineinherited |
◆ getDot() [5/11]
|
inlineinherited |
◆ getDot() [6/11]
|
inlineinherited |
◆ getDot() [7/11]
|
inlineinherited |
◆ getDot() [8/11]
|
inlineinherited |
◆ getDot() [9/11]
|
inlineinherited |
◆ getDot() [10/11]
|
inlineinherited |
◆ getDot() [11/11]
|
inlineinherited |
◆ getPosition() [1/2]
|
inlineinherited |
◆ getPosition() [2/2]
|
inlineinherited |
◆ setPosition()
|
inlineinherited |
◆ operator JAngle3D() [1/2]
|
inlineinherited |
◆ operator JAngle3D() [2/2]
|
inlineinherited |
◆ operator JVersor3D()
|
inlineinherited |
◆ operator JVector2D()
|
inlineinherited |
◆ getX()
|
inlineinherited |
◆ getY()
|
inlineinherited |
◆ getZ()
|
inlineinherited |
◆ add()
◆ sub()
◆ mul() [1/3]
|
inlineinherited |
Scale vector.
- Parameters
-
factor multiplication factor
- Returns
- this vector
Definition at line 173 of file JVector3D.hh.
◆ mul() [2/3]
|
inlineinherited |
Multiply with object.
- Parameters
-
object object
- Returns
- result object
Definition at line 273 of file JMath.hh.
◆ mul() [3/3]
|
inlineinherited |
Multiply with object.
- Parameters
-
object object
- Returns
- result object
Definition at line 273 of file JMath.hh.
◆ div()
|
inlineinherited |
Scale vector.
- Parameters
-
factor division factor
- Returns
- this vector
Definition at line 189 of file JVector3D.hh.
◆ equals() [1/2]
|
inlineinherited |
Check equality.
- Parameters
-
vector vector precision precision
- Returns
- true if vectors are equal; else false
Definition at line 220 of file JVector3D.hh.
◆ equals() [2/2]
|
inlineinherited |
Check equality.
- Parameters
-
versor versor precision precision
- Returns
- true if versors are equal; else false
Definition at line 78 of file JVersor3D.hh.
◆ getLengthSquared()
|
inlineinherited |
◆ getLength()
|
inlineinherited |
◆ cross()
|
inlineinherited |
Get cross product.
Note that this vector should not overlap with the first or second vector,
- Parameters
-
first first vector second second vector
- Returns
- this vector
Definition at line 298 of file JVector3D.hh.
◆ getDirection() [1/2]
|
inlineinherited |
◆ getDirection() [2/2]
|
inlineinherited |
◆ setDirection()
|
inlineinherited |
◆ operator JVector3D()
|
inlineinherited |
◆ getDX()
|
inlineinherited |
◆ getDY()
|
inlineinherited |
◆ getDZ()
|
inlineinherited |
◆ getTheta()
|
inlineinherited |
◆ getPhi()
|
inlineinherited |
◆ normalise()
|
inlineinherited |
Normalise versor.
This operation may set the result to the unit z-vector.
- Returns
- this versor
Definition at line 168 of file JVersor3D.hh.
◆ getCalibration()
|
inlineinherited |
◆ setCalibration()
|
inlineinherited |
◆ getT0()
|
inlineinherited |
◆ setT0()
|
inlineinherited |
Set time offset.
- Parameters
-
t0 time offset [ns]
Definition at line 94 of file JDetector/JCalibration.hh.
◆ addT0()
|
inlineinherited |
Add time offset.
- Parameters
-
t0 time offset [ns]
Definition at line 105 of file JDetector/JCalibration.hh.
◆ subT0()
|
inlineinherited |
Subtract time offset.
- Parameters
-
t0 time offset [ns]
Definition at line 116 of file JDetector/JCalibration.hh.
Member Data Documentation
◆ detector_id
|
protectedinherited |
Definition at line 187 of file JDAQChronometer.hh.
◆ run
|
protectedinherited |
Definition at line 188 of file JDAQChronometer.hh.
◆ frame_index
|
protectedinherited |
Definition at line 189 of file JDAQChronometer.hh.
◆ timeslice_start
|
protectedinherited |
Definition at line 190 of file JDAQChronometer.hh.
◆ address
|
protectedinherited |
Definition at line 141 of file JDAQPMTIdentifier.hh.
◆ id
|
protectedinherited |
Definition at line 112 of file JDAQModuleIdentifier.hh.
◆ __x
|
protectedinherited |
Definition at line 309 of file JVector3D.hh.
◆ __y
|
protectedinherited |
Definition at line 310 of file JVector3D.hh.
◆ __z
|
protectedinherited |
Definition at line 311 of file JVector3D.hh.
◆ __dx
|
protectedinherited |
Definition at line 182 of file JVersor3D.hh.
◆ __dy
|
protectedinherited |
Definition at line 183 of file JVersor3D.hh.
◆ __dz
|
protectedinherited |
Definition at line 184 of file JVersor3D.hh.
◆ t0
|
protectedinherited |
Definition at line 183 of file JDetector/JCalibration.hh.
The documentation for this class was generated from the following file:
